Displaying items by tag: HCS
Bras robotiques pour plateformes robotiques
Différents choix de bras robotiques sont disponibles pour l'automatisation de plateforme robotique.
Nos solutions de logiciel permettent l'intégration d'un à plusieurs bras sur une même plateforme.
Les solutions proposées seront fonction des méthodes à faire exécuter, du nombre de périphériques à connecter et des contraintes de la pièce qui accueillera la solution.
Exemples de bras robotiques |
|
Automatisation bras robotique Staubli TX40 ou TX 60 |
|
|
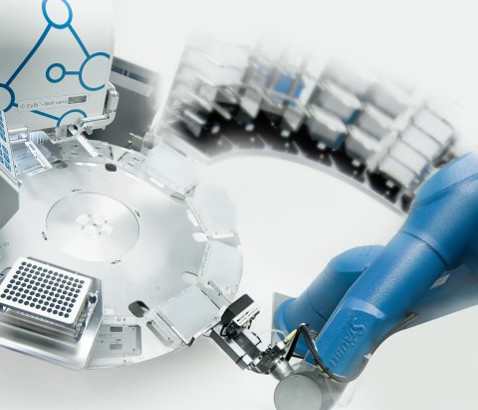 |
Automatisation bras robotique Paa Automation KiNEDx™ ou GX™ |
|
|
 |
Automatisation bras robotique Precise Automation PF750 |
|
|
 |
Automatisation bras robotique CyBi-Carry |
|
|
 |
| Ces exemples ne sont pas exhaustifs... nous consulter ! | |







Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents plateformes robotiques pour criblage en HCS
Les différents plateformes robotiques pour criblage en HCS
Documentations | Vidéos | Images
Plateformes robotiques pour criblage en HCS
La mise en oeuvre de High Content Screening (HCS) ou High-Content Analysis (HCA) permet à travers l'automatisation , d'accélerer le débit de mesure sur ce type de lecteurs.
L'approche automatisée dans l'utilisation de lecteur de HCS ou HCA nécessite la prise en compte de nombreux facteurs car la manipulation de cellules vivantes doit conduire à des résultats reproductibles pour être exploitables.
Ceci constitue une approche relativement nouvelle et cependant nous avons déjà réalisé plusieurs intégrations avec ce type de technologie combinée à une problématique de haut débit.
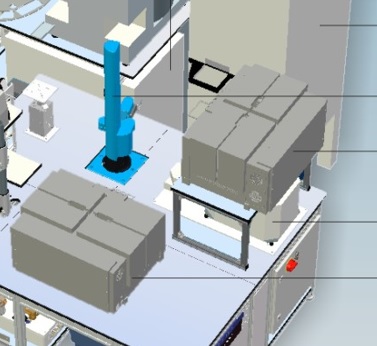
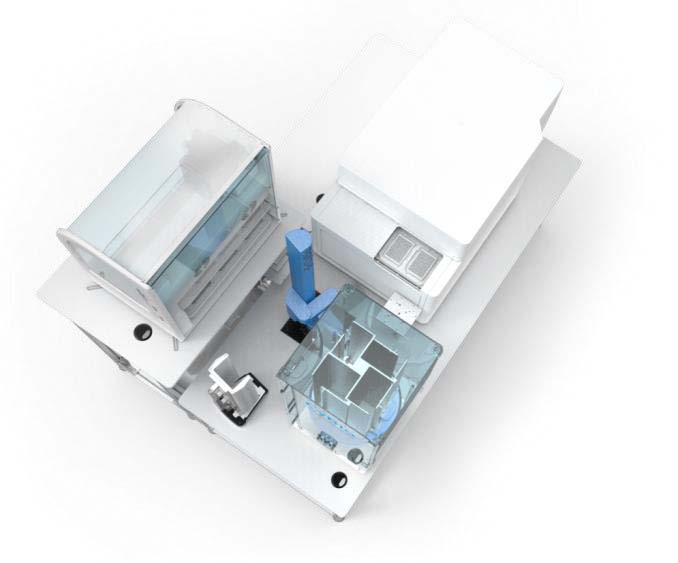
Exemples d'intégration |
|
Automatisation du lecteur HCS de microplaques Yokogawa CV7000 |
|
|
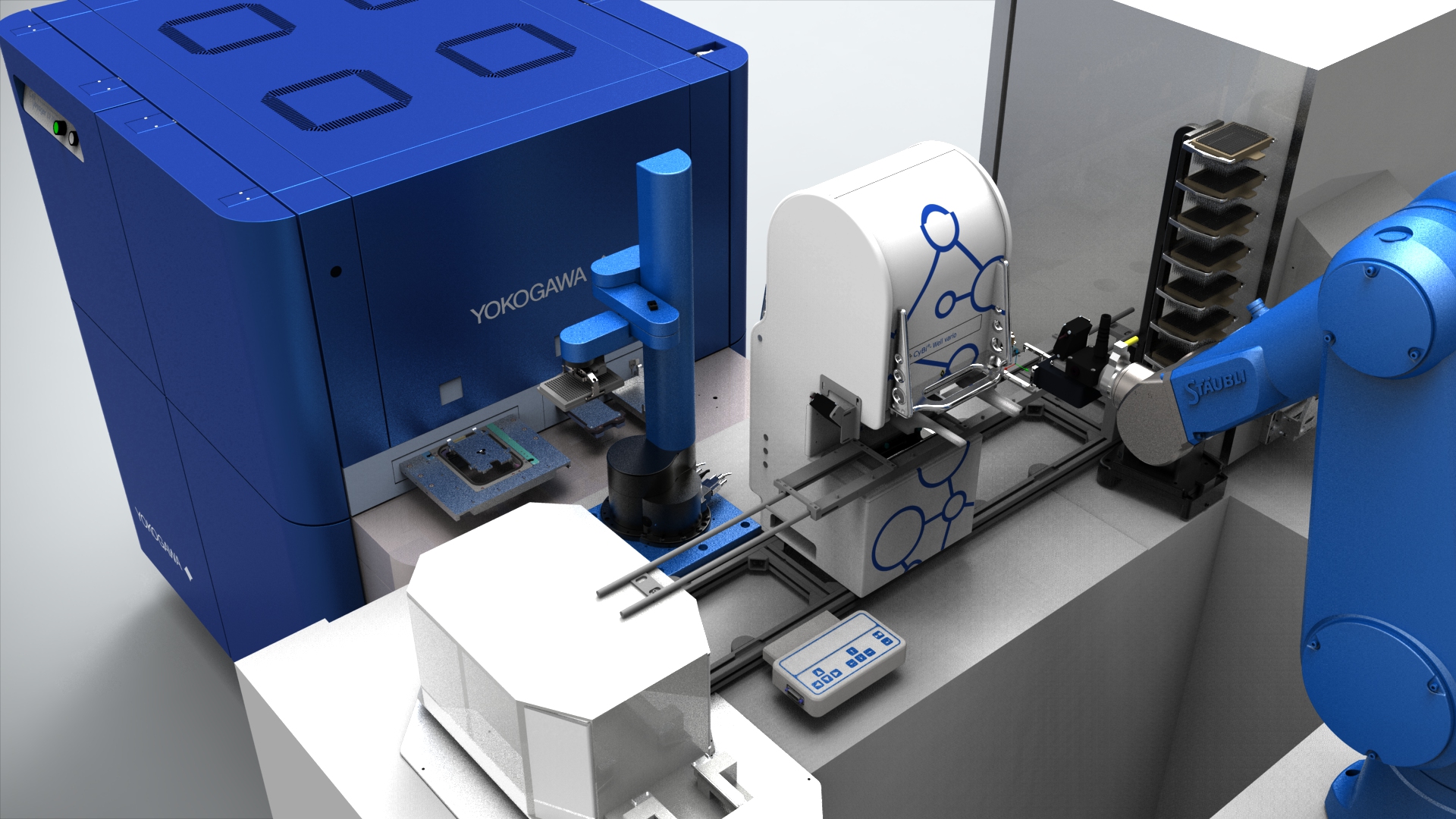 |
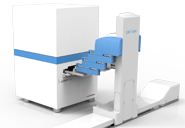
Automatisation du lecteur HCS de microplaques Perkin-Elmer Operetta |
|
|
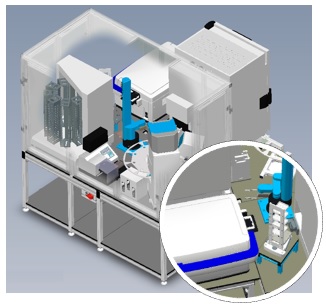 |
Automatisation du lecteur HCS de microplaques Acumen de TTP Labtech |
|
|
 |
Automatisation du lecteur HCS de microplaques In Cell Analyzer 2000 de General Electric |
|
|
 |
| Ces exemples ne sont pas exhaustifs... nous consulter ! | |



Découvrez également:
![]() Notre logiciel Scheduler
Notre logiciel Scheduler
![]() Une liste non exhaustives des différents pluggin disponibles
Une liste non exhaustives des différents pluggin disponibles
![]() Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Les différents choix de bras de manipulation 3 axes, 4 axes, 6 axes.
Documentations | Vidéos | Images